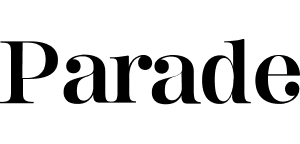
This robot can walk, without electronics, and only with the addition of a cartridge of compressed gas, right off the 3D-printer. (CREDIT: David Baillot/University of California San Diego)
In a nutshell
- Scientists have developed a fully 3D-printed robot that can walk, climb, and even move across water—without the need for electronics. It uses pneumatic pressure to control movement, demonstrating a new approach to robot design.
- The robot is created in a single 58-hour 3D-printing process, with no need for manual assembly. The entire structure, including its functional components, is printed as one cohesive unit, simplifying production.
- This breakthrough in 3D printing opens up possibilities for robots to operate in environments where traditional electronics might fail, such as underwater, in high-radiation areas, or in hazardous conditions like mines.
SAN DIEGO — Stop us if you’ve heard this one before: A freshly created robot walks right off a 3D printer and into a bar. OK, so maybe the bar part isn’t real, but scientists from UC San Diego and BASF created a fully-formed six-legged robot, no assembly required, that hopped right off the printer. The machine only needs only air pressure to walk, climb slopes, and even traverse water. Unlike traditional robots cluttered with electronics and wires, this creation points to a future where complex machines might be as simple to produce as pressing “print.”
The achievement, described in a paper published in Advanced Intelligent Systems, marks real progress toward what roboticists have long viewed as a “holy grail” – robots that can be completely fabricated in one go with minimal human intervention. While most robots today need complex assembly of various components, including electronic circuits, motors, and sensors, this new approach shows how an entire functioning robot can be printed as a single piece.
How It Works: Pneumatic Power Instead of Electronics
At the heart of this innovation is a clever pneumatic oscillating valve system that replaces electronic controls. Most soft robots today depend on electronic components to control their movements, which often means they must remain tethered to an external control system. This new robot needs only a constant source of pressurized air to walk immediately after printing.
The valve system controls the robot’s six legs by directing air through different pathways to create smooth, coordinated movements. What makes this design stand out is its ability to produce four phases of motion that work in perfect sync, which is crucial for efficient walking. Earlier designs could only create odd-numbered phases, leading to uneven movements that made the robot less stable and slower.
The researchers figured out how to get the robot’s legs to work together smoothly using fluid circuits, which is a big step forward. Thanks to this, the robot can now do more complex movements than earlier models.
The design keeps three of the robot’s legs on the ground at all times, forming a stable tripod, while the other three legs lift and move forward. This back-and-forth movement keeps the robot steady, even on rough ground. In tests, it showed off its abilities by climbing an 18° slope on rocky terrain and even walking across water.
One-Shot Printing Process
The entire robot was fabricated in a single 58-hour printing process using a commercially available desktop 3D printer and thermoplastic polyurethane (TPU) material, a flexible plastic that allows for the creation of moving parts and air-tight seals. Once removed from the printer, the robot needed no additional assembly or processing before operation.
When connected to a CO2 cartridge with a pressure regulator, the robot achieved a walking speed of 4 centimeters per second (about 0.19 body lengths per second). One 16-gram CO2 cartridge provided enough air pressure for about 80 seconds of continuous operation, allowing the robot to travel 85 centimeters.
This design could enable new applications in settings where electronic components would be impractical or dangerous, such as underwater environments, areas with high radiation, powerful magnetic fields, or locations with risk of spark ignition. Additionally, using a single material opens possibilities for creating fully recyclable or biodegradable robots.
Innovative Design Solutions
The researchers designed the robot using what they call “Eulerian toolpaths,” a printing technique that ensures airtight components by having the printer nozzle continuously trace through the entire pattern on each layer without lifting off the print surface. This technique proved crucial for creating the components that drive the robot’s movement.
The team also showed how this could be reproduced by having another researcher recreate the robot at a different location using a different 3D printer model. This test resulted in a similarly functional robot, confirming that the design could be reliably replicated using widely available equipment.
Right now, the robot needs an outside air source to work, but the researchers think future versions could have built-in systems to create their own air pressure. They also plan to add features like steering and arms, so the robot can do even more.
Looking Ahead: Democratizing Robotics
This research allows the robot to make more complex, coordinated movements, like walking, rather than just crawling. This is something that previous soft robotics research has struggled to do.
The ability to print fully functional robots using easily available technology could make robotics more accessible to everyone. This could open up new possibilities in fields like education, disaster response, and environmental monitoring. With more improvements, we might one day be able to design and print custom robots for specific tasks, all with a 3D printer.
Paper Summary
Methodology
The researchers used a commercially available desktop 3D printer (Raise3D E2) with a 0.4mm brass nozzle and thermoplastic polyurethane (TPU) material. They developed a printing technique called “Eulerian toolpaths” where the printer nozzle moves continuously through each layer without retraction, creating airtight pneumatic components. The robot design followed three key rules: vertical walls were 0.6mm thick, components were connected by 0.6mm bridges, and closed-loop structures included tiny 0.03mm gaps that fused during printing. This eliminated the need for support structures inside pneumatic chambers.
Results
When powered by a 16-gram CO2 cartridge regulated to 138 kPa (20 psi), the robot walked at 4 cm/s, covering 85 cm in 21 seconds. The robot weighed 172 grams, with the cartridge adding about 200 grams. Without this payload, it achieved speeds up to 7 cm/s. The hexapod design navigated terrain with obstacles up to 2 cm high, climbed an 18° sandy slope, and demonstrated amphibious capabilities by walking underwater. Durability tests showed the oscillating valve could complete nearly 20,000 cycles before temporary failure, with full recovery after a rest period.
Limitations
The robot’s operation time is restricted to about 80 seconds per CO2 cartridge. It currently lacks steering capabilities and manipulators, limiting practical applications. The walking speed (4 cm/s) is relatively slow compared to robots with electronic controls. At pressures above 150 kPa, performance plateaued due to material overstretching. The design still requires an external pressure source with non-biodegradable components. Material constraints present challenges – softer materials can’t generate enough force to lift the robot, while harder materials require higher pressures that risk damaging the system.
Discussion and Takeaways
This research overcomes three major challenges in pneumatic robot design: self-initialization from a neutral printed state, symmetric oscillation through mirrored components, and phase-delay valves preventing lockups. The approach is valuable for environments hostile to electronics (underwater, high radiation, strong magnetic fields, explosion risks). Single-material construction creates possibilities for recyclable robots. The reproducibility across different printers suggests potential for widespread adoption. Future developments could include steering capabilities, manipulators, and onboard pressure sources for greater autonomy.
Funding and Disclosures
The research was funded by BASF Corporation and the National Science Foundation (CMMI-2331917). BASF 3D Printing Solutions B.V. provided the experimental TPU filaments. Two authors (Albert De Boer and Martin Faber) were affiliated with BASF 3D Printing Solutions B.V., and Rohini Gupta was affiliated with California Research Alliance, BASF Corporation.
Publication Information
The paper, “Monolithic Desktop Digital Fabrication of Autonomous Walking Robots,” was published in Advanced Intelligent Systems in 2025. Authors include Yichen Zhai and Jiayao Yan from UC San Diego; Albert De Boer and Martin Faber from BASF 3D Printing Solutions B.V.; Rohini Gupta from BASF Corporation; and Michael T. Tolley from UC San Diego. The paper is published under the Creative Commons Attribution License.